

平成30年度全国発明表彰 受賞発明・意匠概要(敬称略)
(第一表彰区分一覧へ/第二表彰区分一覧へ)
21世紀発明奨励賞
受動歩行由来の無動力歩行支援機の発明(特許第6021124号)
| 佐野 明人 | 国立大学法人名古屋工業大学 大学院工学研究科 教授 |
21世紀発明貢献賞
| 鵜飼 裕之 | 国立大学法人名古屋工業大学 学長 |
本発明は、受動歩行由来の無動力の歩行支援機に関するものである。歩行の本質は、「重力で歩き、重力で倒れる」ことである。従来は、転倒を回避する支える支援技術であった。受動歩行ロボットは、モータ、センサおよび制御を一切用いずに、下りスロープを重力のみで歩くことができ、その動きは人に近くとても自然である。
受動歩行ロボットの揺れ歩く様を応用した本歩行支援機は、動かされている感じはなく、普段通りに歩くだけで振り子の動きとバネの力で脚の動きを整え、人の歩行を本来の自然で滑らかな歩行に導く。人が重力と筋力を使って歩く際のエネルギーを上手く再配分することで、モータ・バッテリ搭載による重量・安全性等の課題を根本的に解決し、さらに脚を効果的に揺らす簡単な構造を採用し、リンクが弾性的にねじれて体がひねりやすいことで、脚が軽くなる感じで歩きやすくなる。
特に、障害者や高齢者が、歩けることを実感し健康で豊かな生活を享受することが期待される。
 |
図1 製品化した無動力歩行支援機(左:ACSIVE®、右:aLQ®) |
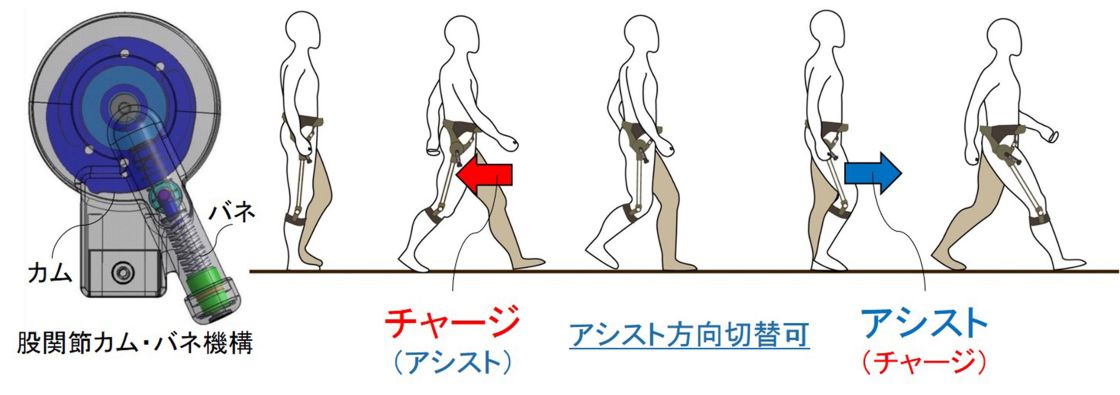 |
| 図2 股関節カム・バネ機構によるエネルギー再配分 |