above 14 years old
Taiwan
TWSD006
The Car Side-Turn Autonomous Annunciator
Description of Invention
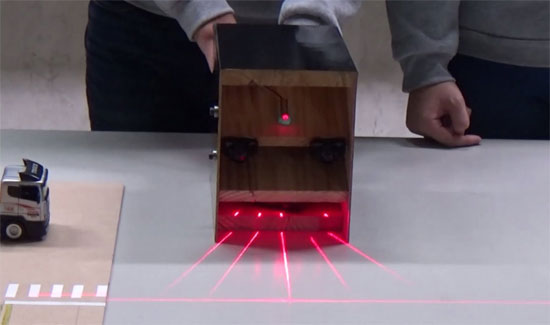
While a large vehicle is making a turn、 the front wheels trajectory of the vehicle is inconsistent with the rear wheels trajectory. The rear wheels cut across the turn on a shorter trajectory than the front wheels on the inside of turn. The phenomenon of the shorter trajectory originated by the rear wheels is defined in the Differential Trajectory between Front and Rear Wheels for vehicles so called Difference of Radius between Inner Wheels、 DRIW. The difference of radius between inner wheels is a blind spot of vehicle driver while driving. Due to the road-users momentary careless blunder including the walkers、 the bicycle riders、 the scooter riders、 and the vehicle drivers、 the many traffic accidents are generated and bring about the casualties in the DRIW zone. In this invention、 the car side-turn autonomous annunciator is designed and developed using the integration of ultrasonic sensing and laser lights output for warning the dangerous DRIW zone and calling attention to the road-users. By way of the integrating design using the sensing of ultrasonic sensor and the illuminating of laser lighters、 when the road-users enter into and stay at the dangerous DRIW zone、 the vehicle immediately makes an audible warning sound in autonomous. The autonomous annunciator contains the warning functions of both active type and passive type in simultaneous. In addition、 the DRIW warning zone of the vehicle generated from autonomous annunciator can be also regulated according to the different vehicle types.
The design of the autonomous annunciator exhibits that the DRIW zone of the vehicle can be rapidly indicated around the blind spot of vehicle. The display of the DRIW zone using the illumination of laser lights is to warn the road-users who may not enter or stay at the DRIW zone and to avoid the traffic accident while the vehicle turns.
Inventor(s)
YEN-JUNG CHEN
YI-HAN YANG
YEN-TING CHEN




