above 14 years old
Russia
RUSS009
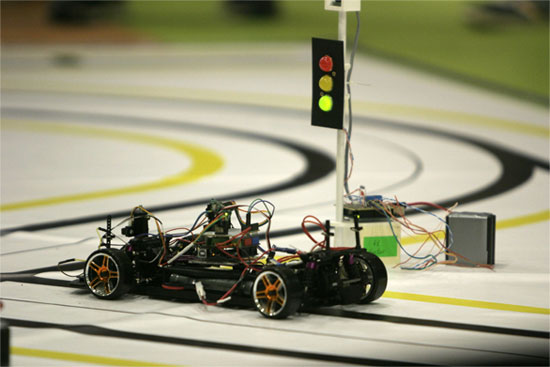
Robotized smart vehicle system
Description of Invention
A robotized vehicle model which can move in city conditions recognizing road signs、 traffic lights and reacting on them in accordance with traffic regulations.
The process of the detector design consists of three basic stages:
1. Preprocessing of the data、 filtering from noise and vectorization of the image.
2. Updating of the traffic lane condition according to the data from the first stage.
3. Drawing updated lanes and other objects on the original image.
Inventor(s)
Bushuev Maksim


